数控机床系统典型故障分析
一、位置偏差过大报警
在 FANUC系统中出现有 4*0及 4*1(其中*代表轴号)的报警。报警解释是位置偏差达大。
在 SINUMERIK810系统中有104*报警号出现(其中*也是代表轴号),报警解释是DAC已达到了极限。
这两个报警有相似的地方,为此我们来讨论一下这个报警产生的原因及处理办法。
实际上这是位置环中的一个问题,我们讨论位置环,就应有一个共同的语言,那就是讨论偏差计数器,如图12—5所示,以后讨论位置环问题,仍要用这个图来分析。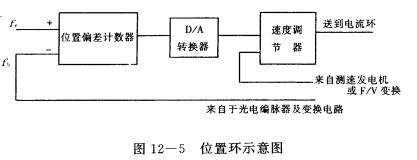
fg是来自于 NC,这是经过插补运算后,由 NC向各轴发出的脉冲,这个脉冲的个数,代表NC要求各轴移动的距离。而这个脉冲的频率是NC要求这个轴运行的速度。它向这个位置偏差计数器进行的是加法计数。
fb是来自于脉冲编码器的反馈脉冲,这个反馈脉冲的个数,代表电机已经实际转过的角度,或者说是工作台运行的实际距离。而fb人的频率是代表脉冲编码器旋转的速度。它通过同步、四分频等控制和转换后送到偏差计数器中去,是减计数。那么在偏差计数器中一加一减,代表的是NC要求这个轴运行的距离还有多少没有走出来。如果这个数愈大,则表明这个距离比NC的要求差的远,这个数小则表明比要求的距离近了。因此把这个数进行D/A转换,转换成模拟量是代表速度指令。距离目标远时,要以快速接近目标,距离目标近时,就要慢慢地接近目标,可以保证准确停车。依此可知D/A转换后的数值是速度调节器的给定信号。速度调节器信号是在一10V~+10V之间,正常给定电压是在6~8V之间(当然也可是负的,负的代表的是反转)。
偏差计数器中的数若增大,一方面说明位置偏差过大,另一方面可能是达到了 D/A转换的极限值。表明伺服系统没有按着NC所要求的速度运行。另外,这个数过大,各轴不同时,也要产生形状的偏差。也就是形状,位置公差均可能超差。因此数控机床中对这个数的大小进行了限制。
在FANUC6的系统中设定了参数074~105(或422到430对第5轴)这个参数就是根据工艺要求及加工精度设定的参数。这个参数中的内容就是偏差计数器的值一旦超过了这个值就报警,这个值是我们可以进行修改的,一旦报警,我们在设定的参数改一下值,改大一些,就可以不报警,但是,前面我们已经说过了,这个值有一个极限值,再者,这个值对加工零件的位置与形状的精度有密切的关系,所以这种修改参数的办法,应是参数设置不合理或者是参数丢失才采用。
下面再看 SINUMERIK810,它对这个偏差计数器的限定是用 D/A转换器的极限来限定的,它的输出是速度调节器给定,因此,它所用的机床参数是限定最大速度给定值,所用的MD是MD268*,MD268*是最大转速的额定值,输入范围是0~8192,标准值是8192,其单位为VELO(D/A转换的单位)。它的解释是:用这一输入确定转速额定值输出最大电压值,它根据转速调节器内可能有的额定值极限进行调节(通常10V)超出极限,则停止插补,并发出报警104*。我们通过这一段的叙述,SINUMERIK810的104*报警,实际上也是由同一种原因产生的报警,应该说与FANUC所给报警的内容基本一样,但也有差别;那就是报警的输出点不同,报警内容的限定参数也不同。所谓输出点不同,就是我们还要在SINUMERIK810报警中,考虑到 D/A转换器是否还有问题,这个硬件有问题,也会出现这种情况,例如产生固定为1的故障,即s—a—1。
偏差计数器中数值增大的原因:我们知道fg是加计数,fb是减计数,如果fg=fb,那么偏差计数器中的数就会不变,即使变也就是士 1个 VELO。如果fg>fb,那么,肯定的说,在偏差计数器中的数会愈来愈大。不久,就可以超出给定的限定参数值。
数值增大的时机:首先是加速过程。也就是当给定某轴速度时,电机还没有转起来,这时只有fg向偏差计数器中加数,而电机缓慢启动,反馈的fb很小,减计数少,那么偏差计数器中的值就不断增长;当电机转到正常所要求的转数时,偏差计数器中的值不会再上升。当然,如果当fg=fb时,电机还在作加速度上升,那么可能出现反馈脉冲频率大于给定的频率,即fb>fg,这时偏差计数器中的值,可能还会下降,因为减数大了。最后,总会达到一个平衡,即fb=fg,而且运行是稳定的,偏差计数器中的值,经过D/A转换,所得到的给定速度时,恰好产生出以fb作为反馈频率的频率值,等于给定fg的频率值。
所以第一个问题可能出在加减速时报警,那么就是加减速不够快,因此要对加减速进行调节参数。当然这是在加减过程中出现的,也就是一启动某一个轴,还没转起来,就出现这个报警,就要想到是不是这个问题影响的。
其次,是电机转速的问题。fg是代表给定的速度,fb是代表电机实际转速,如果fg>fb,那么这种稳定运行,也会很快出现这种报警,这种报警出现的快慢,决定于fg与fb的差值,这种差值愈小,那么报警出现的就晚一些,如果这个差值很大,那第这个报警就出现的早一些。
电机转速低的原因:如果正常给定是不变的,也就是偏差计数器中的值是不变的,也就是伺服系统的给定VCMD是不变的,而电机的转速不够,可能是电源电压不够,或者说伺服变压器给出的电压不够。电机的给定电压小,当然转速就下来了。在这里,我们就要考虑电源电压是否缺相,是否电压值已超出了十10%—一15%的运行范围,三相电源是否对称等。这就可以用万用表进行测量。
这些地方如果不存在问题,那就应该考虑到电动机,电动机是否存在毛病;例如电机电刷是否接触良好。电机整流子表面是否良好,电机是否有转动不灵活的地方,轴承是否已经破碎,润滑不好。因为,电机要是有毛病,当然旋转起来也会丢转的。
再一个就要考虑,负载是否有问题。例如负载过大,或者夹具夹偏造成摩擦阻力过大等等问题。总之要检查作用在电机的作用力是否过大,而使电动机丢转过多,这项工作的检查一定要过细,避免以后事故扩大,以至出现受损面扩大的现象。
如果上述检查都没有发生问题,这时就要考虑伺服板和触发板上的问题。伺服板的速度调节器输出的值是否有问题,能不能通过调节KV就可以解决问题,因为KV加大,就是比例积分调节器的比例放大系数加大,这样就可以使在相同的给定下,使电动机转速加大一些。当然,我们也要去考虑整个调节器板是否有问题,也可以采用换板的方法,去试一下调节器板是否存在问题。这是一个很细致的工作,要求我们考虑的周到一些。
我们还应去分析下光电编码器的反馈是否正确,这可以通过光电编码器的反馈脉冲送人示波器去观察。
除此之外,还要注意各接线端子是否松动,虽然这是最简单的检查方法,但不可忽视。
在分析这些问题之前,一定要注意到由NC来的人的频率是否过高,也就是给定的速度是否过大,这一点在开始就要注意到。
在这里,我们还要强调一下测速发电机的信号,当然很多系统中已不再采用测速发电机来对速度采样,而是采用光电编码器的M-T法来采样速度。但速度反馈对速度调节器的输出有重大关系,如果测速发电机的给出值过高就会使电动机达不到所要求的速,一定比所要求的速度低。因此,我们也一定要注意到这个环节的调节。这个环节容易出现问题,特别是测速发电机存在着很多隐患。
二、机床爬行与振动
在数控机床中有很多明显的不正常现象,但在有一些经济数控系统中,却没有报警,即使有时出现报警,报警的信息表明也不是你所看到不正常现象的报警。机床出现爬行与振动就是一个明显的例子。机床以低速运行时,机床工作台是蠕动着向前运动;机床要以高速运行时,就出现震动。
关于机床爬行有的书上写着:由于润滑不好,而使机床工作台移动时摩擦阻力增大。当电机驱动时,工作台不向前运动,使滚珠丝杠产生弹性变形,把电机的能量贮存在变形上。电动机继续驱动,贮存的能量所产的弹性力大于静摩擦力时,机床工作台向前蠕动,周而复始地这样运动,而产生了爬行的现象。然而事实并非如此,仔细看一下导轨面润滑的情况,就可以断定不是这个问题。
机床爬行和振动问题是属于速度的问题。既然是速度的问题就要去找速度环,我们知道机床的速度的整个调节过程是由速度调节器来完成的。特别应该着重指出,速度调节器的时间常数,也就是速度调节器积分时间常数是以毫秒计的,因此,整个机床的伺服运动是一个过渡过程,是一个调节过程。
凡是与速度有关的问题,只能去查找速度调节器。因此,机床振动问题也要去查找速度调节器。可以从以下这些地方去查找速度调节器故障:一个是给定信号,一个是反馈信号,再一个就是速度调节器的本身。
第一个是由位置偏差计数器出来经D/A转换给速度调节器送来的模拟是VCMD,这个信号是否有振动分量,可以通过伺服板上的插脚(FANUC6系统的伺服板是X18脚)来看一看它是否在那里振动。如果它就是有一个周期的振动信号,那毫无疑问机床振动是正确的,速度调节器这一部分没有问题,而是前级有问题,向D/A转换器或偏差计数器去查找问题。如果我们测量结果没有任何振动的周期性的波形。那么问题肯定出在其他两个部分。
我们可以去观察测速发电机的波形,由于机床在振动,说明机床的速度在激烈的振荡中,当然测速发电机反馈回来的波形一定也是动荡不已的。但是我们可以看到,测速发电机反馈的波形中是否出现规律的大起大落,十分混乱现象。这时,我们最好能测一下机床的振动频率与电机旋转的速度是否存在一个准确的比率关系,譬如振动的频率是电机转速的四倍频率。这时我们就要考虑电机或测速发电机有故障的问题。
因为振动频率与电机转速成一定比率,首先就要检查一下电动机是否有故障,检查它的碳刷,整流子表面状况,以及机械振动的情况,并要检查滚珠轴承的润滑的情况,整个这个检查,可不必全部拆卸下来,可通过视察官进行观察就可以了,轴承可以用耳去听声音来检查。如果没有什么问题,就要检查测速发电机。测速发电机一般是直流的。
测速发电机就是一台小型的永磁式直流发电机,它的输出电压应正比于转速,也就是输出电压与转速是线性关系。只要转速一定,它的输出电压波形应当是一条直线,但由于齿槽的影响及整流子换向的影响,在这直线上附着一个微小的交变量。为此,测速反馈电路上都加了滤波电路,这个滤波电路就是削弱这个附在电压上的交流分量。
测速发电机中常常出现的一个毛病就是炭刷磨下来的炭粉积存在换向片之间的槽内,造成测速发电机片间短路,一旦出现这样的问题就避免不了这个振动的问题。
这是因为这个被短路的元件一会在上面支路,一会在下面支路,一会正好处于换向状态,这3种情况就会出现3种不同的测速反馈的电压。在上面支路时,上面支路由于少了一个元件,电压必然要小,而当它这个元件又转到了下面支路时,下面的电压也小,这时不论在上面支路,还是在下面支路中,都必然使这两条支路的端电压下降,且有一个平衡电流流过这两条并联的支路,又造成一定的电压降。当这个元件处于换向,正好它也处于短路,这时上下两个支路没有短路元件,电压得以恢复,且也无环流。这样,与正常测速发电机状态一样。为此,三种不同情况下电压做了一个周期地变化,这个电压反馈到调节器上时,势必引起调节器的输出也做出相应地,周期地变化。这是仅仅说了一个元件被短路。特别严重时有一遍换向片全部被碳粉给填平了,全部短路,这样就会更为严重的电压波动。
反馈信号与给定信号对于调节器来说是完全相同的。所以,出现了反馈信号的波动,必然引起速度调节器的反方向调节,这样就引起机床的振动。
这种情况发生时,非常容易处理,只要把电机后盖拆下,就露出测速发电机的整流子。这时不必做任何拆卸,只要用尖锐的勾子,小心地把每个槽子勾一下,然后用细砂纸光一下勾起的毛刺,把整流片表面再用无水酒精擦一下,再放上炭刷就可以了。这里特别要注意的是用尖锐的勾子去勾换向片间槽口时,别碰到绕组,因为绕组线很细,一旦碰破就无法修复,只有重新更换绕组。再一个千万不要用含水酒精去擦,这样弄完了绝缘电阻下降无法进行烘干,这样就会拖延修理期限。
除了我们上面讨论过这些引起振动的原因外,还可能是系统本身的参数引起的振荡。众所周知;一个闭环系统也可能由于参数设定不好,而引起系统振荡,但最佳的消除这个振荡方法就是减少它的放大倍数,在FANUC的系统中调节RV1,逆时钟方向转动,这时可以看出立即会明显变好,但由于RV1调节电位器的范围比较小,有时调不过来,只能改变短路棒,也就是切除反馈电阻值,降低整个调节器的放大倍数。
采用这些方法后,还做不到完全消除振动,甚至是无效的,就要考虑对速度调节器板更换或换下后彻底检查各处波形。
在这个实例中,出现爬行时,电机是在低速,一旦提高速度就震起来,这时电流就可能出现过流报警。产生这种报警的原因是机床工作台面为了迅速跟限反馈信号的变化而变化,必须有一个很大的加速度才行,这个加速度就是由电机的转矩给出的。电机转矩的变化来响应这个速度给定信号(实际上是反馈信号)的变化。转矩就是电流信号。大的转矩,就是大的电流信号造成的,在电流环中出现了一个电流的激烈变化,从而出现了过电流现象。 在振动时不报警,而在振动加大时,出现了过电流报警。
从这个例子中,我们可以这样总结:位置问题去找位置环,而速度问题去找速度环。所谓位置环就是研究零件加工的尺寸问题,零件的尺寸的精度要去研究位置环。当然,零件尺寸的重复精度还和基准点有关,我们在后面还要讨论基准点返回问题。但总的说来,尺寸问题,位置问题,要求考虑的对象是位置环,或者说与位置环有关的部分应是考虑的主要对象。速度的问题就要去研究速度环以及与速度环有关的部分。
加工零件形状有了问题,这显然是由几个轴进行插补造成的。这就是NC对轴进行的脉冲分配,那么如果我们认为NC对轴的脉冲分配是正确的(常常是这样,很少遇到是NC出了毛病,或插补软件出了毛病而出现形状不对的现象),那么各轴在忠实地执行NC的指令上肯定存在问题。我们可以去查各个轴伺服单元存在的问题。我们如果想加工一条有一定斜率的直线,那么这两个轴的速度要按斜率的比率关系给定。
由于数控机床是机电一体化产品,这里边影响机床正常工作的因素很多,例如上面我们曾讨论过的加工形状误差的原因,除了电气方面的问题之外,我们在数控机床的验收一节中曾经讨论过失动量的测定,这也是影响加工的几何形状一个重要问题,这个机械方面的问题也与电气的问题混在一起,这种情况就十分难以分辨出到底哪个因素在这个问题中的比重占有多少。
这些相关的因素是制约我们迅速查出故障的重要因素。
三、归基准点的故障诊断
机床的基准点就是机床坐标轴移动到一个预先指定好的准确位置,该位置的坐标值,置于该坐标实际位置计数器中去。基准点的坐标值可以任意设定。但应以编写零件程序方便,人们习惯且容易记忆为准则,当然取整数为最好。另外亦从省工时角度出发安排,例如TC系列加工中心X轴基准点安排在一个托盘更换位置。归基准点后,只要不发生坐标轴实际坐标计数器计数出错(多记或少记)故障,不管该轴进行多少次往复运动与操作,机床控制系统总能以保持基准点为基准,实际坐标与实际位置一致。一旦机床在运行中出现坐标轴出错,机床即报警,且自动要求重新执行归基准点操作,在重新操作归基准点之前,这个报警无法消除,也不能进行自动工作或MDA操作。因此,上述指定的准确基准点的位置,在每次操作归基准点时要有很高的重复精度。它是由机械进行粗定位和电气进行精定位来完成的。
每次机床的启动后,首先都要进行归基准点的操作,只有完成了归基准点操作之后,才建立起机床的坐标系。之所以这样,就是因为经济型数控机床,普遍采用的是半闭环系统,也就是采用光电编码器检测转的角度来决定工作台移动的距离,而这种光电编码器,多半是采用增量式光电编码器,这种编码器比绝对编码器的信号处理简单而且价格也便宜得多,但是这种编码器只能测出增量值,也就是每次启动要回到一个基准点,然后从这里算起,来记录增量值。当然,如果采用的是绝对编码器就用不着每次启动必须回基准点,它在什么位置,就可以通过它的脉冲编码读出来。
采用全闭环的系统也存在回基准点问题,如果采用的是光栅,感应同步器或者是磁栅,它们绝大多数是增量式的,当然它们也是绝对式的,但绝对式的也和绝对编码器一样,不好处理信息(在理论上不存在处理信息问题,而是手续比较复杂,所用器件也多),再一个是价贵。因此,只要采用的是增量式的,也有回基准点的问题。
回归基准点有两种比较常见的方法,即栅格法和磁开关法。下面仅介绍栅格法。
选择JOG方式,旋转到ZRN接通(与十24伏接通),机床运动部件以快速移动,并按动JOG FEED按钮,使机床运动部件朝着基准点方向运动。
通过碰撞减速开关,作为返回参考点的减速信号(*DECX,*DECY,*DECZ,*DEC4N之一),使返回运动速度减速。在减速后,运动部件以一恒定低速运动,当减速限制开关返回原位置时,运动部件的其他部分再一次碰上它之后,再出现一个电的栅格点时,运动停止,同时INC发出参考返回完成信号ZPX、ZPY、ZPZ或ZP4。
各轴返回方向可单独设定。如果从单方向执行参考点返回,一旦运动部件超过了参考点,
它以反向移动,并且返回参考点,一经参考点返回完成并且发出相应信号ZPX、ZPY、ZPZ或ZP4,轴就不能由手动进给指令运动,直到ZPN信号断开为止。
归基准点有两种方式:有自动方向识别和无自动方向识别方式。无自动方向识别方式的归基准点过程是,选择归基准操作方式启动后,轴先以归基准速度(快速)向指定方向移动,碰上归基准减速限位开关后,轴在减速信号的控制下减速到关断速度继续移动,当轴到达测量基准点标记指定的第一归基准脉冲前沿后,制动为零,过标记后又以关断速度移动指定距离而停于基准点;有自动方向识别方式的归基准点过程是,选择归基准操作方式启动后,轴先以归基准点速度向指定方向移动,碰到归基准点减速限位开关后,轴在“减速信号”控制下,减速到零,再反向加速到关断速度,反向移动,当轴到达测量系统基准点标记指定的第一归基证脉冲前沿后制动到零,过标记后,又以关断速度移动指定距离而停止于基准点。
归基准点操作可能出现下列故障:
(l)无自动方向识别方式或有自动识别方式坐标轴在执行归基准点时,没有减速过程,一直等碰到位置极限开关停机,从而造成归基准点操作失效。该故障原因可能是归基准点减速开关失效,运行中基准点标记指定的归基准点脉冲不起作用。
(2)归基准点过程有减速,但以关断速度移动(或改变方向移动)直到触及限位开关而停机,没有找到基准点,归基准点操作失败。
该故障原因可能是减速后,归基准点标记指定的基准脉冲不出现。具体讲,有2种可能:一种光栅在归基准点操作中没有发出已归基准点脉冲信号,或归基准点标记失效,或由基准点标记选择的归基准点脉冲在传输或处理过程中丢失,或测量系统硬件故障,对归基准点脉冲信号无识别或处理能力;二是减速开关与归基准点标记位置错位,减速开关复位后,没有出现基准点标记。
对第一种情况可使用信号跟踪法,用示波器检查信号状态,判断故障。对第二种情况,可试着适当调整限位开关(减速开关)与归基准点位置标记之间的距离关系,即可消除故障。
(3)归基准点过程有减速,且有归基准标记指定的归基准点脉冲出现,及制动到零的过程,但未到基准点即触及到极限位置开关而停机,即归基准点操作失败。该故障原因可能是归基准点的基准点脉冲已被超越,因此坐标轴未移动够指定距离,已触及极限限位开关,所以只好停机。